About Me
My name is Yu Yang (杨煜). I am currently a Ph.D. candidate in the Department of Control Science and Engineering at Zhejiang University (ZJU), where I have been since 2021, under the supervision of Prof. Yong Liu at the April Lab. From Feb 2025 to Feb 2026, I was a visiting Ph.D. student at National University of Singapore (NUS), working under the guidance of Prof. Gim Hee Lee at the CVRP Lab.
Research
My research lies at the intersection of Embodied Agents, Generative World Models, and 3D Computer Vision.
Currently, I am dedicated to developing autonomous self-evolving agents that continuously adapt and improve through complex environmental interactions. I also focus on 3D/4D world modeling, exploring controllable scene synthesis to create high-fidelity digital environments. By advancing agentic world modeling, I aim to bridge the gap between agent execution and environment interaction, leveraging world models as internal simulators to empower agents with efficient and adaptive policy optimization.
Furthermore, I leverage a strong background in 3D computer vision, with a focus on holistic scene perception and semantic understanding. I am also deeply interested in extending these 3D vision techniques to end-to-end autonomous driving, aiming to develop foundation models that integrate robust environmental awareness with closed-loop decision-making.
Agent
- Self-Evolving Agents via Lifelong Continual Learning
- Policy Optimization leveraging Reinforcement Learning (RL)
World Model
- Agentic World Modeling for Policy Improvement
- Controllable 3D/4D Scene Generation for World Simulation
3D Computer Vision
- 3D Scene Perception and Semantic Understanding
- Foundation Models for End-to-End Autonomous Driving
News
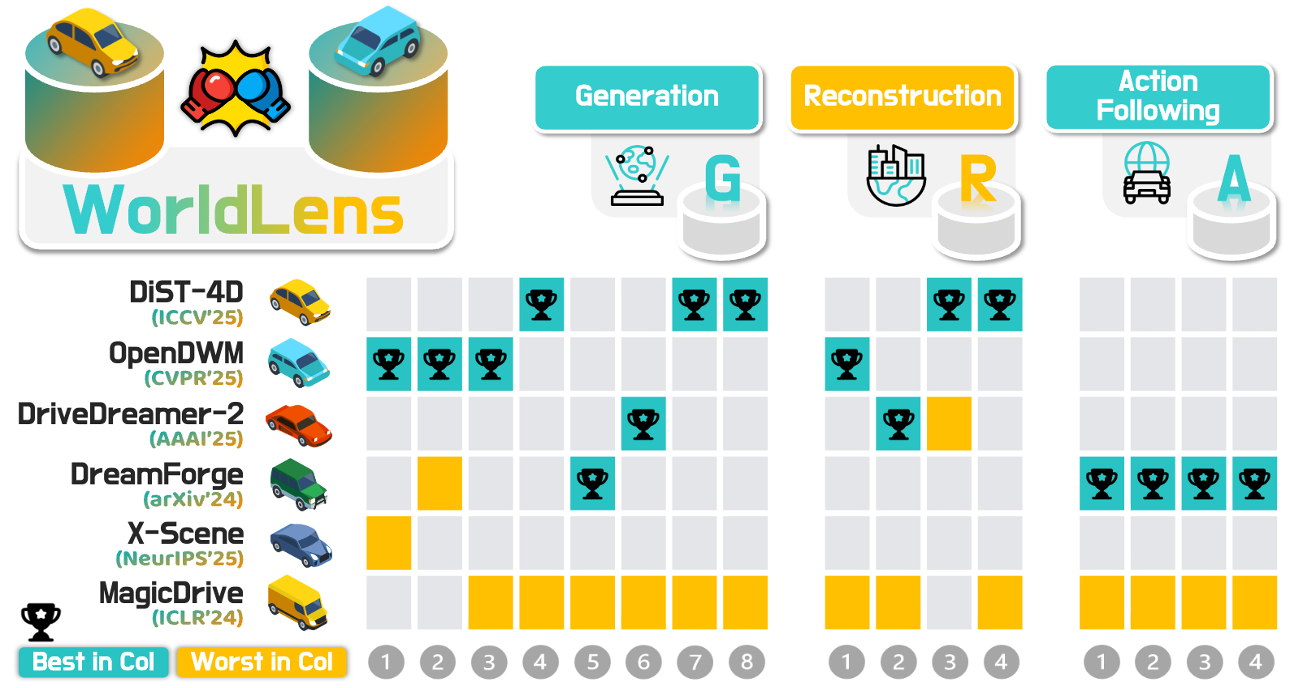
- 2026.04: Our paper WorldLens is accepted by CVPR 2026 (Oral).
- 2026.02: We are excited to release 3D and 4D World Modeling: A Survey.
- 2026.02: Our paper IR-WM is accepted by ICRA 2026.
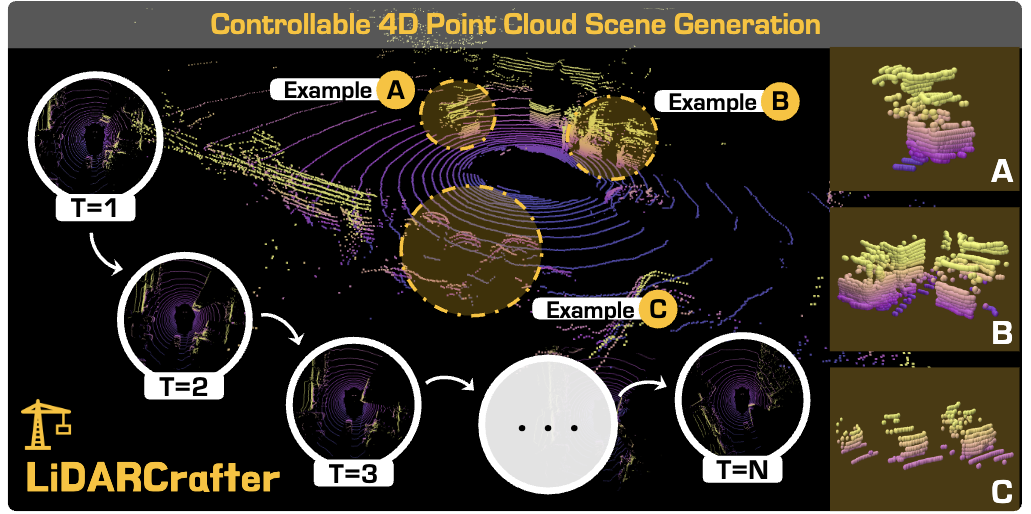
- 2025.10: Our paper LiDARCrafter is accepted by AAAI 2026 (Oral).
- 2025.09: Our paper 𝒳-Scene is accepted by NeurIPS 2025.
- 2025.02: I joined the CVRP Lab at NUS as a visiting Ph.D. student.
- 2024.12: Our paper Drive-OccWorld is accepted by AAAI 2025 (Oral).
- 2024.09: Our paper SGN is accepted by IEEE Trans. on Image Processing.
- 2023.07: Our paper CenterLPS is accepted by ACM MM 2023.
- 2023.06: Our paper PANet is accepted by IROS 2023.
- 2023.06: Our paper SSC-RS is accepted by IROS 2023.
Publications
SPIRAL: Self-Evolving Action-Conditioned Video Generation via Reflective Planning Agents

Vision-Centric 4D Occupancy Forecasting and Planning via Implicit Residual World Models

Driving in the Occupancy World: Vision-Centric 4D Occupancy Forecasting and Planning via World Models for Autonomous Driving
DreamForge: Motion-Aware Autoregressive Video Generation for Multi-View Driving Scenes
DQFormer: Toward Unified LiDAR Panoptic Segmentation With Decoupled Queries for Large-Scale Outdoor Scenes
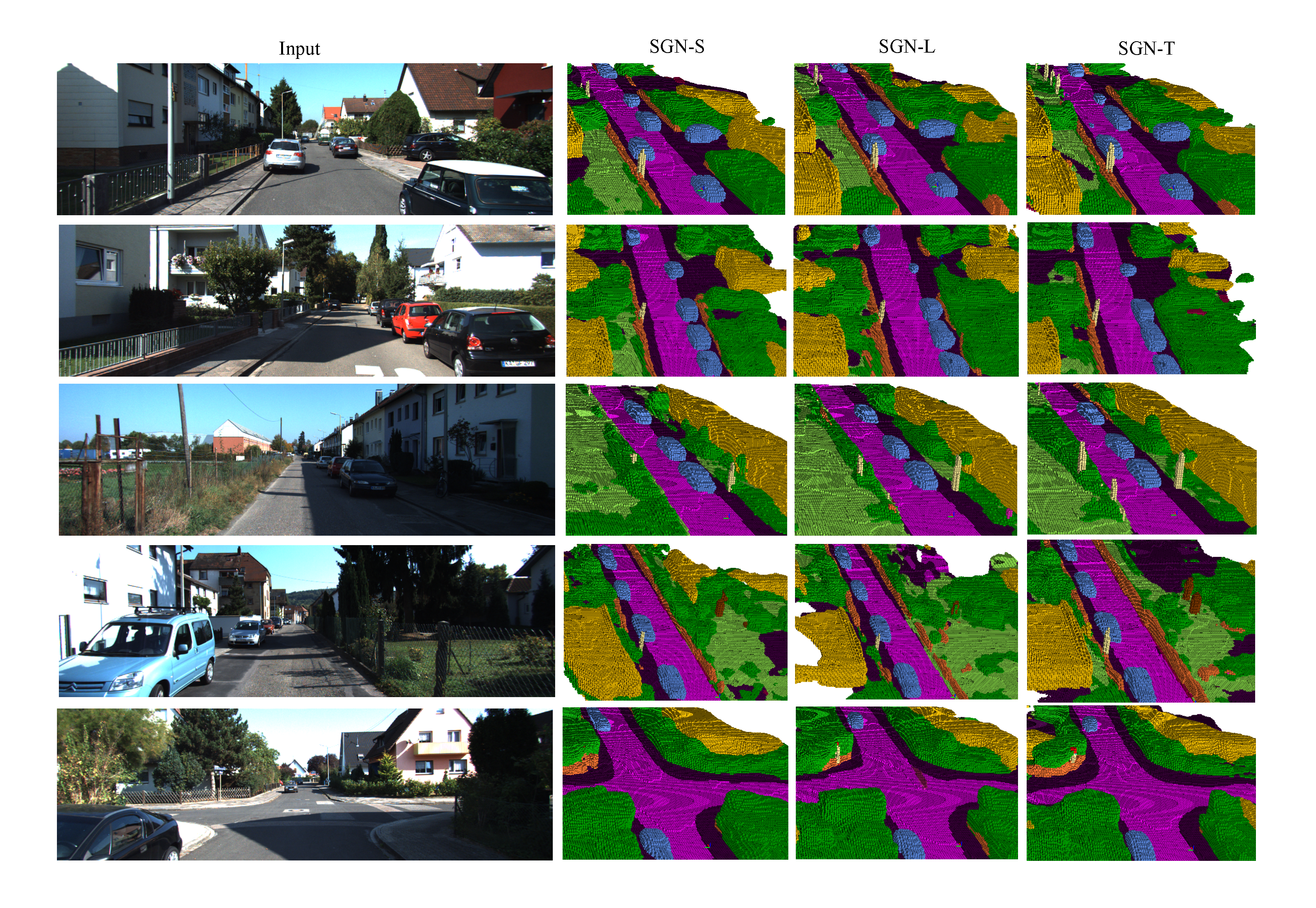
Camera-based 3d semantic scene completion with sparse guidance network
Exploit Spatiotemporal Contextual Information for 3D Single Object Tracking via Memory Networks

CenterLPS: Segment Instances by Centers for LiDAR Panoptic Segmentation
PANet: LiDAR Panoptic Segmentation with Sparse Instance Proposal and Aggregation
SSC-RS: Elevate LiDAR Semantic Scene Completion with Representation Separation and BEV Fusion
Exploiting semantic-level affinities with a mask-guided network for temporal action proposal in videos
Experience




Awards and Honors
- 2025.10: Academic Scholarship, Zhejiang University
- 2024.10: China Scholarship Council (CSC) Scholarship
- 2023.10: Academic and Faculty Scholarship, Zhejiang University
- 2019.10: National Scholarship, Ministry of Education of China
- 2019.10: First Prize in the National Undergraduate Electronic Design Competition (Top 2.4%)
- 2018-2020: Academician Scholarship, Faculty Scholarship
Services
Journal Reviewer
- IEEE Transactions on Neural Networks and Learning Systems (TNNLS)
- IEEE Transactions on Image Processing (TIP)
- IEEE Transactions on Multimedia (TMM)
- IEEE Transactions on Circuits and Systems for Video Technology (TCSVT)
- IEEE Robotics and Automation Letters (RAL)
Conference Reviewer
- Advances in Neural Information Processing Systems (NeurIPS)
- International Conference on Machine Learning (ICML)
- AAAI Conference on Artificial Intelligence (AAAI)
- IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
- IEEE/CVF International Conference on Computer Vision (ICCV)
- European Conference on Computer Vision (ECCV)
- ACM International Conference on Multimedia (ACM MM)
- IEEE International Conference on Robotics and Automation (ICRA)
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)